Beschreibung:
Seit aufkommen der SMD-Technologie suchte ich nach geeigneten Möglichkeiten, um die Bestückung der Bauteile einfacher zu gesallten. Zuerst noch mit Lötkolben und Pinzette, dann mit Paste aus einer Dispenserspritze und später dann mit gelaserten PET-Folien als Pastenschablonen. Doch wirklich besser wurde es erst mit dem Aufkommen von günstigen Pastenschablonen aus gelasertem Stahl. Damit war nun das Druckbild meist hervorragend. Nun mussten nur noch die Komponenten effizient platziert werden. Lange Zeit war dies Handarbeit. Irgendwann hatte ich dann das Glück, dass ein bekannter Verein sich eine Bestückungslinie bestehend aus Bestückungsautomat, Pastendrucker sowie Reflow-Ofen zugelegt hat. Die anfängliche Euphorie über die Automaten wurde jedoch davon getrübt, dass das Einrichten deutlich mehr Zeit in Anspruch nimmt, als die händische Bestückung von 1-2 Exemplaren. Und oft geht es ja gerade darum, 1-2 Muster zu bauen. Also war auch hier kein Ende der Handbestückung in Sicht.
Die Idee:
Die Idee von einem einfach zu bedienenden, möglichst flexiblen Bestückungssystem war nach wie vor da. Doch wie sollte sowas aussehen? Nach vielen Jahren der Gedanken und Entwicklung und etwa der 4 oder 5ten 3D-Konstruktion, habe ich dieses XY-Portal gefunden:

Quelle: https://www.makeblock.com/project/xy-plotter-robot-kit
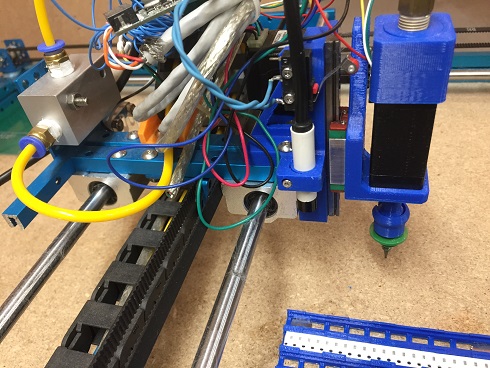
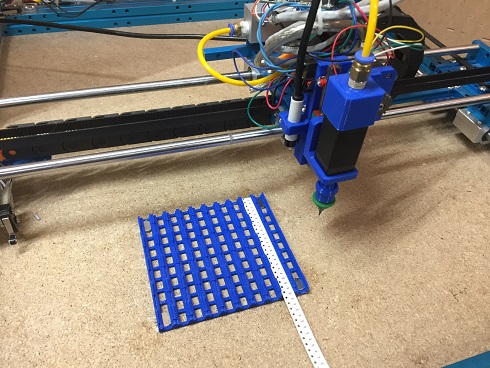
Da war die Idee da, dieses Portal so zu erweitern, dass man damit Bauteile bestücken kann. Einige Zeit verging, und das Projekt schritt immer wieder ein bisschen weiter voran. Es wurde ein Portal für den Bestückungskopf konstruiert, sowie neue Motorentreiber entwickelt.
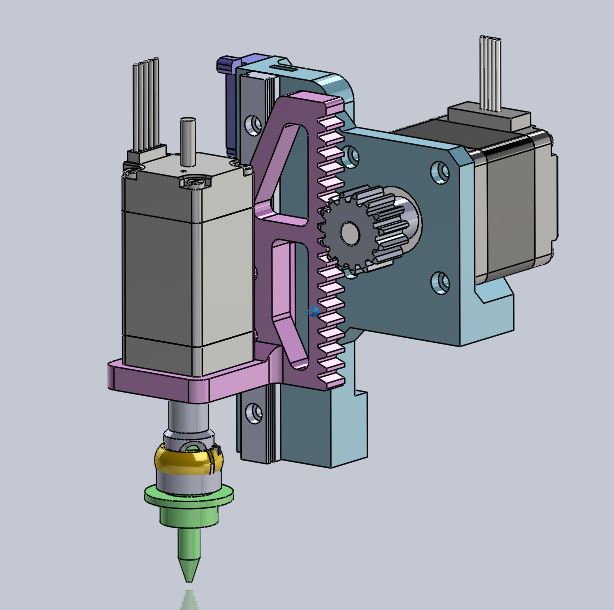
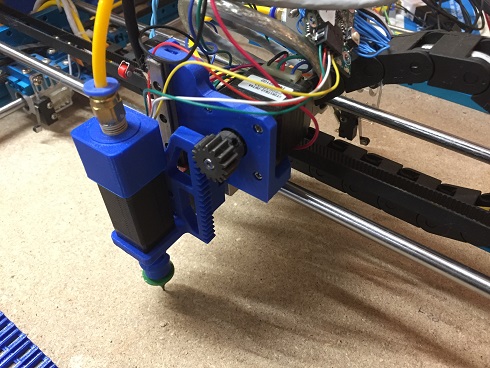
Der Bestückungskopf besteht aus einer kleinen Linearführung, sowie zwei Schrittmotoren. Wobei der Schrittmotor welcher die Düse hält, eine Hohlachse hat. Dadurch lässt sich an der Oberseite ein Vakuum anschliessen und so die Bauteile ansaugen. Das Violette Element oben Links ist ein Endschalter, welcher für die Kalibrierung notwendig ist. Auf der linken Seite befindet sich noch eine Haltevorrichtung für eine Endoskopkamera. Diese wird zur exakten Positiononierung verwendet.
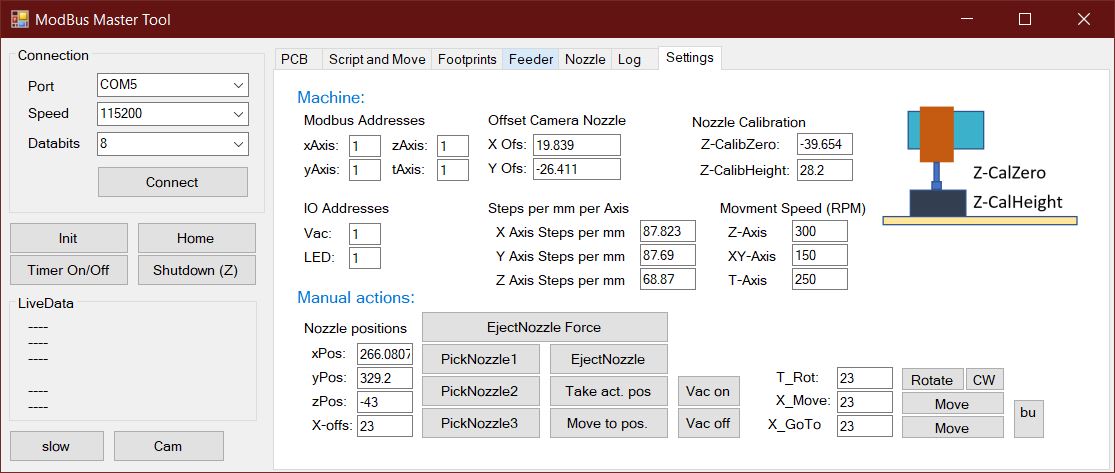
Die Steuerung:
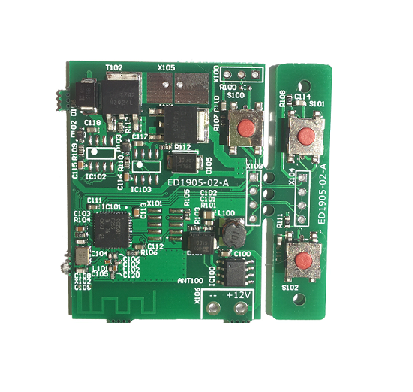
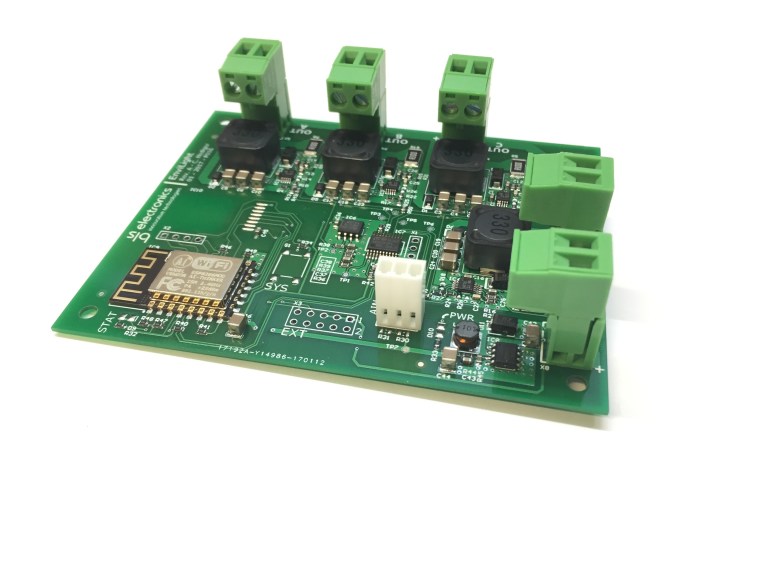
Alle Motoren sowie In und Outputs werden vom sogenannten iMotion Modul gesteuert. Dies ist ein selbst entwickeltes Modul zur Steuerung von Schrittmotoren über ModBus.
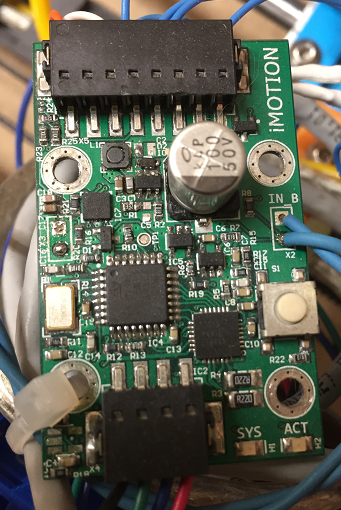
Es beinhaltet einen STM32F030 Mikrocontroller, ein SN65HVD75DR RS485 Transceiver sowie ein Allegro A4988 Schrittmotortreiber.
Das Board lässt sich mit einer Spannung von bis zu 24V versorgen. Dies ermöglicht es, auch hochohmigere Schrittmotoren problemlos betreiben zu können.
Kommuniziert wird mit dem Modul mittels ModBus (RS485). Dazu wurden einige Register vordefiniert. Das entsprechende Dokument findet sich in der rechten Spalte unter Downloads.
Dank diesen Modulen war die Konfiguration bzw. die Steuerung der Anlage von einem PC-Aus sehr einfach. Hierfür wurde eine C# Anwendung entwickelt.

Die Software:
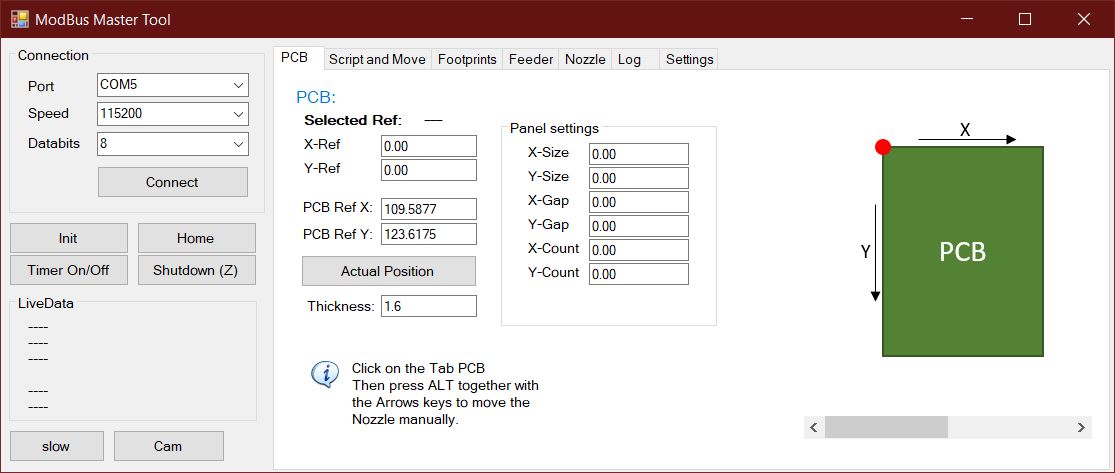
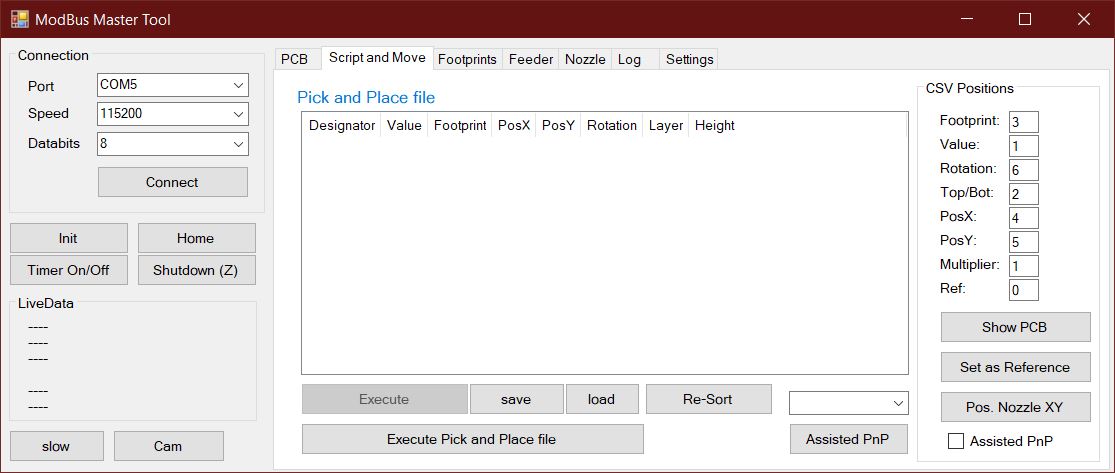
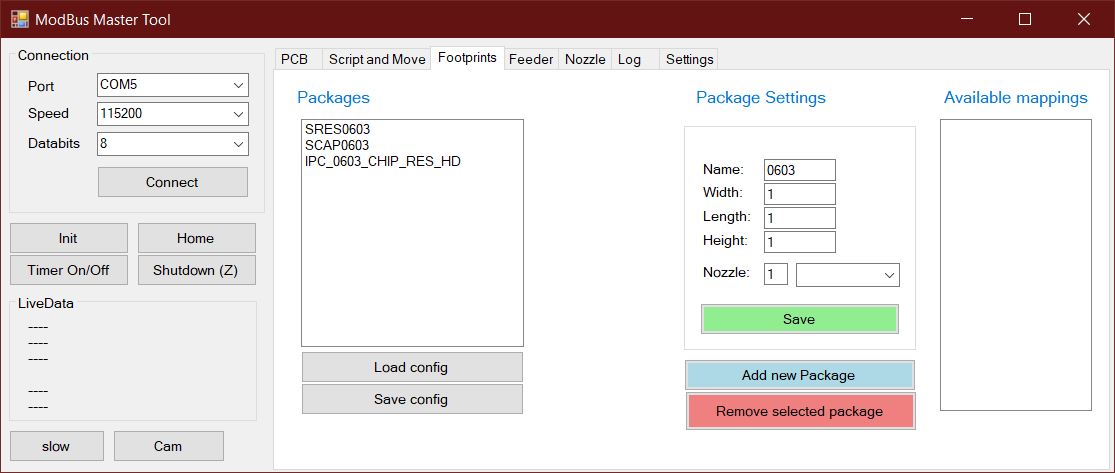
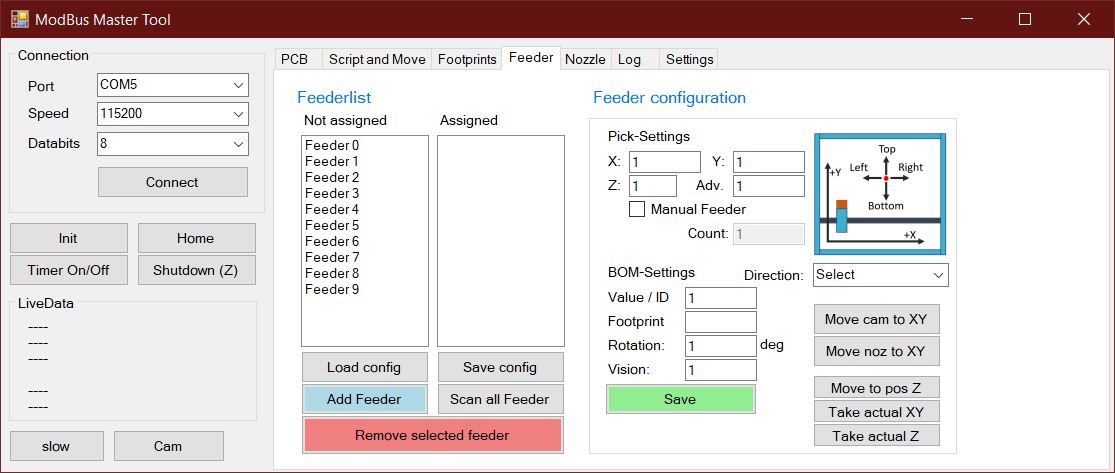
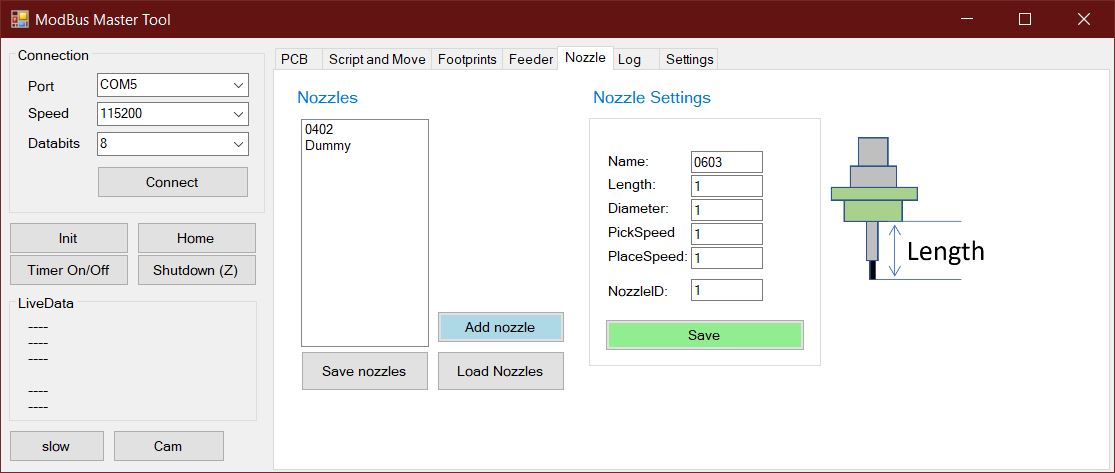
Die Softwar wurde so konzipiert, dass diese eine möglichst hohe flexibilität ermöglicht. So werden z.B. Packages sowie Feeder und Düsen unabhängig voneinander Definiert. Wohingegen ein Package zu einem bestimmten Nozzle gehört. Wenn nun also im Pick and Place File ein Bauteil mit einem 0805 Package auftaucht, weiss die Software bereits, welches Nozzle benötigt wird.
All diese Konfigurationen lassen sich als Dateien speichern und Laden. So lassen sich z.B. die Zuordnungen von Feedern zu Bauteilen bequem vorkonfigurieren und dann neu laden.
Projektstand: work in Progress
Aktuelle Version: A